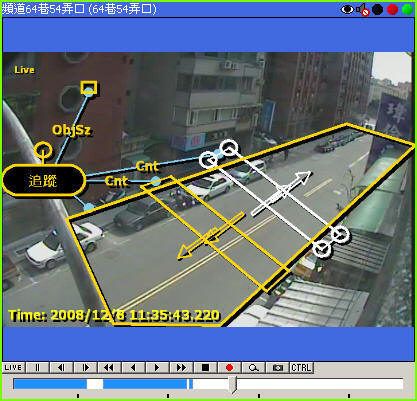
Objec tracking analyzes video sequence, isolates background (still objects) and
foreground (moving objects), and then further track foreground objects to
perform object trail tracking, directional counting, standing still detection
(loitering), missing object, and foreign object detection.
物件偵測功能為電腦對動態影像進行分析,先區分前景(移動物件)與背景(固定不動),再進一步標記前景之不同物件,以進行追蹤、計數、停止偵測、消失偵測等功能。
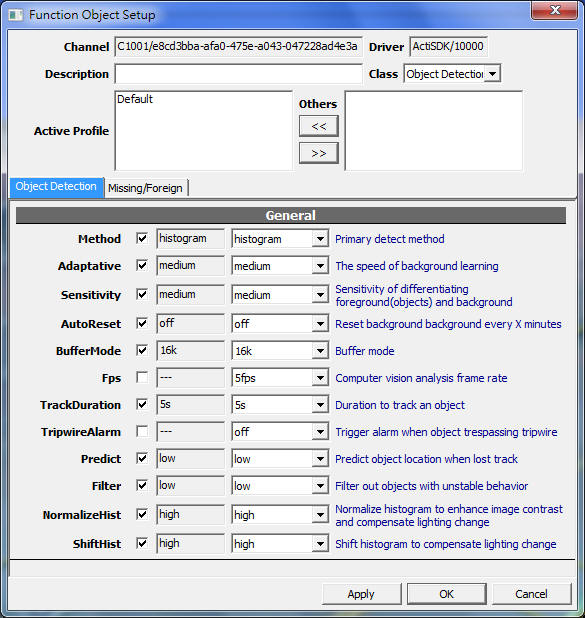
Method
Primary method (algorithm) used to perform object tracking. This parameter
affects CPU and memory usage. Also potentially different methods perform
differently on different scene.
物件追蹤所使用的演算法:此參數影響中央處理器與記憶體的負載,以及不同場景的追蹤結果。
|
histogram
|
Higher accuracy. More memory usage.
準確度高,使用較多的記憶體
|
|
norm_dist
|
Less memory usage.
使用較少的記憶體
|
|
feature
|
Only applicable to certain scene.
在某些特定的場景可能有較佳的準確度
|
Adaptative
The rate of learning background. When objects stand still for a long time, they
will be treated as part of the background. This parameter affects how fast
should a still object be considered as background. When still object detection
is a less requirement, configure this parameter to a higher value to increase
background learning speed to prevent scene-change induced error rates.
學習背景的速度:畫面中靜止不動的物件,在一定時間後將被視為背景的一部分,此參數影響物件融入背景的快慢。若無偵測靜止物件的需求,較高的學習速度可減少場景變化所造成的誤判。
|
high
|
Objects standing still for 10 seconds will be considered as
background.
幾乎無法偵測靜止物件,靜止十秒內即視為背景
|
|
medium
|
Default value. Objects standing still for about 1 minute will be
considered as background.
預設值,靜止物件約在一分鐘內融入背景
|
|
low
|
Can detect objects standing still for a long time. (More than 10
minutes)
可偵測靜止物件十分鐘以上
|
Sensitivity
Sensitivity to differentiate foreground and background pixels. Higher
sensitivity means better detection rate, but also more false results.
AutoReset
Auto reset background every X minutes. In environments with inconsistent
lighting, auto reset background periodically may improve tracking and reduce
false positive.
BufferMode
The internal image buffer size used to perform computer vision algorithms.
追蹤功能所使用的記憶體緩衝區大小。
Fps
Detection frame per second. This parameter affects the accuracy and the CPU
resource usage.
追蹤功能的禎率(frame
per second):此參數影響連續追蹤的準確度與運算資源的使用量。
|
20fps
|
Maximum computing resource usage, used to track high-speed objects.
使用最高的運算資源,用於追蹤高速的物件
|
|
5fps
|
Default value.
預設值
|
|
1fps
|
Minimum computing resource. May only detects slower objects.
使用最少的運算資源,只能偵測速度較慢的物件
|
TrackDuration
Length of tracked object trail. This parameter affects tripwire counting and
still object detection.
物件追蹤的軌跡長度:此參數影響計數功能(tripwire)以及靜止物件的偵測。
|
3s
|
Track slower objects.
追蹤較慢的物體
|
|
1s
|
Default value.
預設值
|
|
200ms
|
Must be paired with Fps=20fps, used to track
high-speed objects.
須搭配參數Fps=20fps使用,用於追蹤極高速的物體
|
TripwireAlarm
Trigger alarm when tripwire is crossed.
Predict
When lost track, use the last position and speed of the object to predict its
position in the following frames. This improves detection rate but generates
false results.
Filter
Filter out objects with dramatic change in size, speed, or shape.
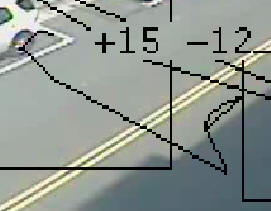
The object shown above jumps and is unlikely to be a real object. It's actually
caused by the shadow and sunlight change.
NormalizeHist
Normalize histogram to enhance image contrast, thus improves detection rate. For
image with very low contrast, this may enhance noise instead.


Left: original image, right: histogram normalized.


Contrast enhancing actually produces more artifacts than image features.
ShiftHist
Shift histogram to compensate lighting change. This is highly recommended for
outdoor detection.


Same scenario with different lighting. Before the computer learns the new
background, almost the entire scene is a very big object.